




















1 方案概要
此方案融合了物联网中多种的通讯形式,包括红外以及语音智能识别,可通过智能手机(Android)通过语音对人形机器人进行控制。
同时,机器人可作为物联网中的一部份,其他物联网中的设备如智能手机、PC机、其他机器人可通过红外遥控等多种形式与此人形机器人进行互动。
|
产品名称 |
规格 |
备注 |
|
人形机器人 |
Robonova II METAL FIGHTER |
17自由度不带视觉 |
|
WiFi转红外模块 |
HBE-IOT-IR |
一端连接手机,一端连接机器人 |
|
手机(Android)示例 |
|
可通过语音对机器人进行遥控的App范例 |

2 构成与名称
2.1 .舵机 MRS-D2009SP

MRS-D2009SP
接口:多协议接口
旋转角度:180度
稳定,耐用的Karbonite齿轮,双滚珠轴承,电压,电流,位置数据读取功能,可更换的顶部套件XA,地步套件X2,喇叭X2
2.2 .控制器

MR-C3024FX
Robonova-II MR-CR3024 控制器最大可控制23个数字输入输出,8通道A/D数模转换,陀螺仪传感器,超声波传感器输入等,可搭载各种功能模块。

铝合金与舵机组合提高安装的便利性,机器人保护壳耐用,强度高更有效的保护机器人。主要部件如下图所示:、

3 功能

4 包装清单

5 .规格
|
伺服电机 |
17个 |
金属配件 |
1套 |
|
PC接口线缆 |
1个 |
专用镍氢电池 |
1个 |
|
专用充电器 |
1个 |
机器人控制器(MR-C3024) |
1个 |
|
CD-ROM |
1个 |
螺栓配件套装 |
1套 |
|
大小 |
325*180*90 |
|
重量 |
1.2kg |
|
扭矩 |
9kg/cm3 |
|
工作时间 |
平均30分钟以上 |
|
充电时长 |
大概60分钟 |
6 主要实验练习
|
序号 |
实验内容 |
|
1 |
展示优美舞蹈实验; |
|
2 |
展示战斗实验; |
|
3 |
足球对战实验; |
|
4 |
与小朋友游戏实验; |
|
5 |
躲避障碍物比赛实验; |
|
6 |
姿势变换实验; |
|
7 |
应用控制板练习机器人; |
|
8 |
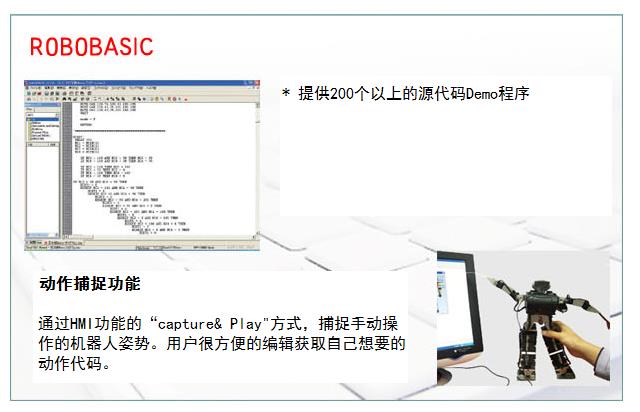
基于ROBOBASIC的动作控制编程; |
|
9 |
实时处理可通过显示器实时监视; |
|
10 |
机器人通过蓝牙可与PC机实时通讯,方便程序调试、下载。 |

