




一、开放类项目平台
DARwIn-OP外型精巧,带有独立处理系统,配有多款传感器,高载荷能力及实时动态动作操控能力,适合各种研发及教学用途。
ROBOTIS OP2是一个有着先进计算能力的mini人形机器人平台,有多种传感器,高负载能力和动态运动能力,增加了许多有趣的研究,教学和宣传活动。
ROBOTIS OP2是ROBOTIS OP的一个新版本,以前的名字是达尔文机器人。

二、方便接口标准的基于PC端的机器人


高性能和特征:
1、 标准步速:20.0cm、 0.25秒/步,客户可修改步行
2、 标准恢复站立时间:2.8秒(面部向地)、3.9秒(面部向上), 客户可修改动作
3、 内置个人计算机:1.6GHz Intel Atom Z530 on-boa
4、 管理控制器(CM-740):ARM CortexM3 STM32F103RE 72MHz
5、 20个电机模块(6 DOF 腿部*2+3 DOF 手臂*2+2 DOF 膝盖)
6、 电机采用耐用的金属齿轮(DYNAMIXEL MX-28T)
7、 自我保护工具包
8、 低功耗待机模式
9、 1Mbps 高速运转联合控制
10、 1800mAh 锂电池,充电器和电源适配器
11、 通用功能(能接收当前残留和外围设备)
12、 3轴陀螺仪,3轴加速计,3个按钮,2个检测器
三、高效和通用的模块化配置

四、简单的体系结构

五、开放的平台(硬件和软件)

六、尺寸和重量

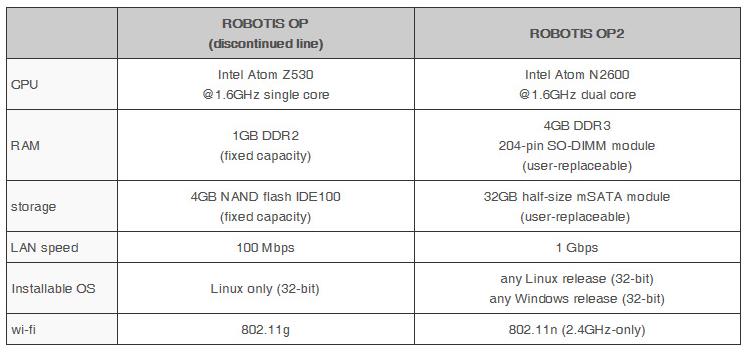
七、参数比较表
八、ROBOTIS OP系列的视觉区别

ROBOTIS OP2和ROBOTIS OP端口的位置不同,模式、开始和重置按钮保持不变。


